Tippe die Lampe an
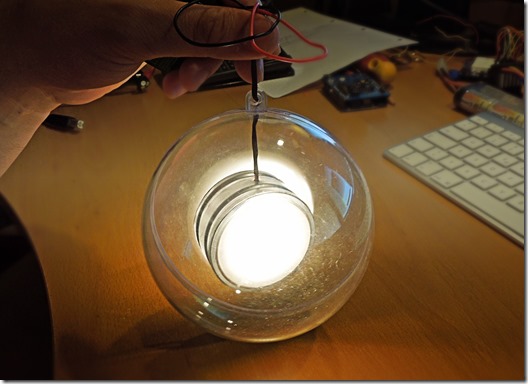
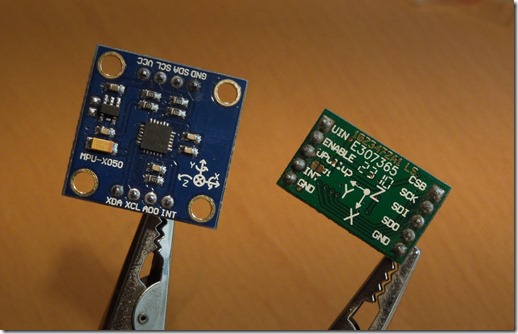
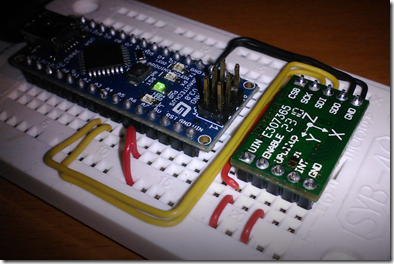
Letztes Jahr habe ich zu dem Sensor BMA020 bereits ein Code Beispiel für den Arduino gepostet . Nun dachte ich, da der so rum liegt, kann man den vielleicht auch mal für etwas verwenden. Also kam mir die Idee eine Lampe einzuschalten, in dem man gegen sie tippt oder leicht schlägt. Im späteren Verlauf stellte ich fest, dass einige Widerstände zu groß berechnet wurden. Die Abweichungen kommen durch die LED, die eigentlich für 12V ausgelegt sind und ich sie aber mit 9V betreibe. (Für den ATMega fehlt auf dem Bild der Quarz, PIN9 und PIN10) Zunächst skizzierte ich mir meine Schaltung und berechnete anhand des Schaltbildes die Widerstände. Dann sammelte ich meine benötigten Komponenten zusammen und steckte sie auf meinem Breadboard, um zu sehen ob meine Überlegung richtig ist. Versuchsaufbau der Schaltung Natürlich funktioniert die Schaltung nicht ohne einen Programmcode und daher musste ich mir zunächst etwas überlegen. Zum Beispiel wie ich aus den drei Achsen einen Wert