DLPF einstellen für den MPU6050
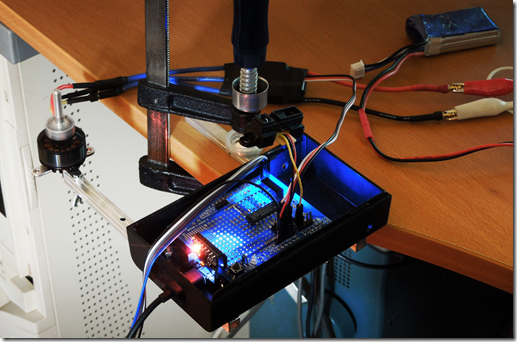
Kleiner Versuchsaufbau mit Sensor und Brushless Motor Auf einem Quadrocopter sorgen die Motoren für viel Vibrationen, die sich ohne einen Filter auf den Sensor negativ auswirken. Über ein Verlaufsdiagramm über die Beschleunigung und die Winkelgeschwindigkeit kann man deutlich hoch frequentierte Abweichungen sichtbar machen. In einem meiner ersten Tests hatte ich die Funktion DLPF (Digitaler Low-Pass Filter) vom Sensor nicht eingeschaltet und wunderte mich zunächst, warum die Lage nicht reguliert wurde. Also erweiterte ich mein Programm zur Analyse und sah dann das Problem. Das nächste Bild zeigt den Sensor stillliegend mit laufendem Motor. Die schwarze Linie zeigt die Rohdaten an, die grüne Linie zeigt das Ergebnis nach einer Glättung an. Die Vibrationen vom Motor erschweren es, die eigentlich Lage festzustellen, die der Sensor wirklich hat. Zuvor kannte ich die Lösung von analogen Tiefpassfiltern. In der Digitaltechnik sieht das etwas anders aus. Es ist ein zeitkritische