MPU6050 Sensor auslesen mit dem Netduino (Repost)
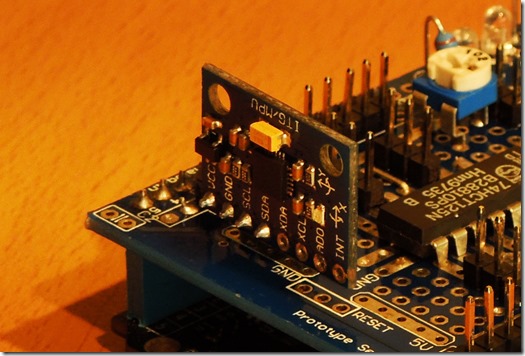
Fest verlötet auf meinem Shield. Anfang des Jahres habe ich bereits darüber geschrieben und dazu auch ein Beispiel Projekt gepostet. Nun möchte ich diesen Artikel neu aufsetzen und etwas mehr auf einzelne Punkte eingehen. Zunächst nochmal der Hinweis, es handelt sich wieder um einen reinen Funktionalen Programm Code und hat daher keine Fehlerbehandlung. Ein paar Informationen zu dem Sensor Hersteller InvenSens Bezeichnung MPU-6000 und MPU-6050 Sensor Achsen 6 Gyroskope Einstellungen +-250°/s, +-500°/s, +-1000°/s, +-2000°/s Beschleunigungseinstellungen +-2g, +-4g, +-8g, +-16g Verbindung I²C (der 6000er hat zusätzlich SPI) Kommen wir nun zum eigentlichen Thema. Ursprünglich gab es von Jeff Rowberg bereits eine fertige Library in C++ . Leider ließ sich dieser Code nicht für den Netduino verwenden und daher strebte ich an, eine C# und .NET Micro Framework Variante zu schreiben. Zugegeben, alleine mit dem PDF Dokument hätte ich das nicht verstanden und war fro