Luftdrucksensor BMP085 mit dem Netduino - Luftdruck (Teil 1)
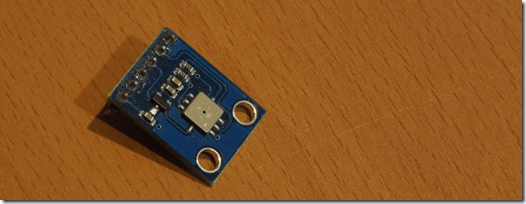
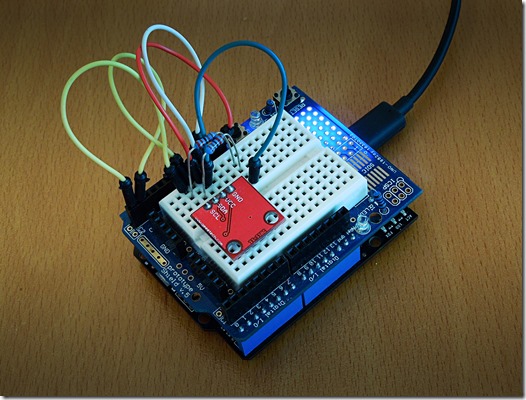
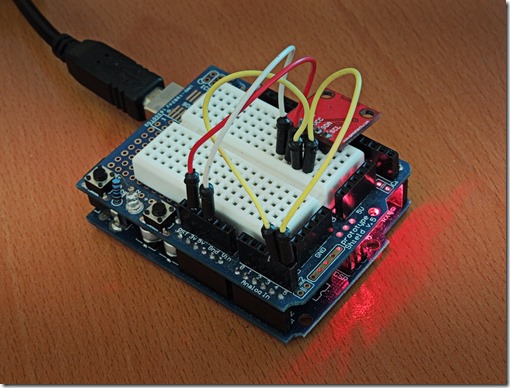
Für das Erfassen von Wetterdaten eignet sich der Sensor BMP085. In erster Linie misst dieser den Luftdruck, kann jedoch auch die Temperatur messen. Dennoch bleiben wir zunächst bei einem kurzen Testprogramm für den Netduino. public class BMP085 : I2CDevice { // Bestimmt wie lange gewartet wird in Millisekunden private int _Timeout = 1000; // Standard Mode private int _Mode = 1; // Empfangspuffer private byte [] _Receive = new byte [3]; // Konstruktor mit vererbten Konstruktor von der I2CDevice Klasse public BMP085() : base ( new Configuration (0x77, 40)) { } // Sensor lesen public int ReadSensorData() { // Status Abfrage senden if (Write( new byte [] { 0xF4, ( byte )(0x34 + (_Mode << 6)) }) == 0) { Debug .Print( "Status abfrage konnte nicht ausgeführt werden." ); return 0; } // Kurz abwarten Thread .Sleep(8); // Sensor Erg