Abstandsmessungen mit dem Netduino
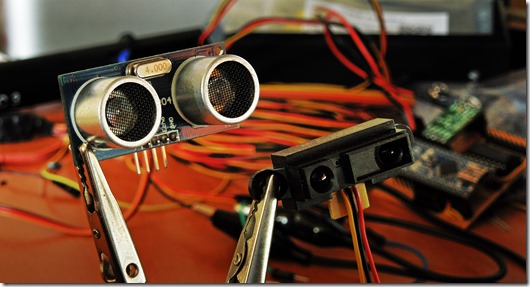
Links: HC-SR04 Ultraschall Sensor, Rechts: GP2-1080 Optischer Sensor Für die Abstandsmessung kann wahlweise ein Ultraschall- oder ein optischer Sensor verwendet werden. Naja beides könnte man auch verwenden, es kommt aber auf die Anwendung an: Welche Entfernungen muss ich messen können? In welcher Umgebung wird agiert? Wie sieht es mit Störfaktoren aus? Wie viel darf der Sensor kosten? Was nun von beidem besser ist, möchte ich hier nicht begründen, da beide Varianten eine Daseinsberechtigung haben. Für einen richtigen Vergleich hätte ich allerdings mehr einkaufen müssen, daher ist meine Vergleichstabelle nur als Ansatz gedacht. HC-SR04 GP2-1080 Betriebsspannung 5V 4,5V-5,5V Stromaufnahme 15mA 33mA Messung erfolgt Abstand von Trigger Puls bis Echo Puls Ergebnis wird als Analoges Spannungssignal ausgegeben Distanzmessung 2cm - 400cm 10cm – 80cm Nachteile Kann durch Geräusche gestört werden Funktioniert auf Reflektierenden Oberflächen nicht Vorte