Feuchtigkeitssensor HTU21D mit dem Netduino (Teil 1)
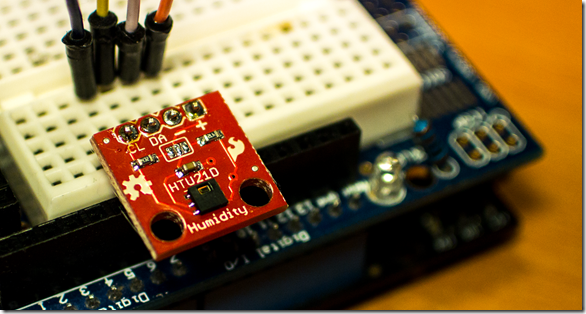
Zuvor habe ich für meinem Weather Shield einen Feuchtigkeitssensor DHT11 verwendet. Wer diesen kennt, weiss sicherlich wie ungenau die Messwerte sind. Ich möchte den Sensor nicht schlecht reden, denn immerhin ist er sehr günstig. Möchte man allerdings für eine Anwendung mehr Genauigkeit und eine schnelle Abtastung der aktuellen Feuchtigkeit und Temperatur, bieten andere Sensoren deutlich bessere Ergebnisse. Ein paar interessante Daten zum Sensor: Schnittstelle I²C Betriebsspannung: 3,3V (max. 3,6V) Stromaufnahme: ca. 10mA Temperaturmessung ca. 50ms bei 14Bit (7ms bei 11Bit) (-40°C bis 125°C) Feuchtigkeitmessung ca. 16ms bei 12bit (3ms bei 8Bit) Kostet ab 6,50€ bei Ebay über einem chinesischen Händler Weitere Daten findet ihr im Datenblatt. Ansprechen lässt sich der Sensor über den I²C Bus und kann mit dem .NET Micro Framework mit geringen Aufwand programmiert werden. Das Einstiegsverhalten lässt sich mit dem Luftdruck Sensors BMP085 vergleichen, über den ich bereits geschri