Welchen Motortreiber verwenden
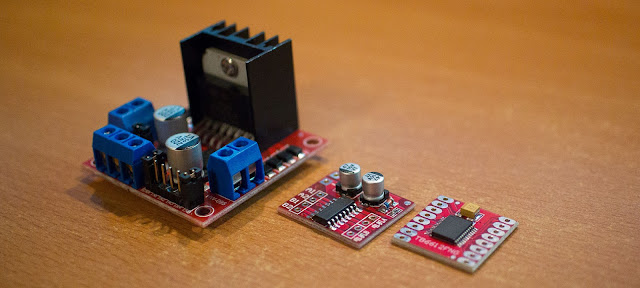
Auf dem Markt gibt's viele Motortreiber für bestimmte Projekte, aber im Detail unterscheiden sich diese bezüglich ihrer Eignung. Mein Projekt wird ein neuer Motortreiber für die Lego Powerfunction Motoren. Zuletzt hatte ich einen Motortreiber für zwei Motoren gebaut und programmiert, jetzt soll ein Motortreiber für acht Motoren entstehen. Motortreiber MX1508 Den verwendeten Motortreiber MX1508 findet man fälschlicherweise auch unter L298N. Der bereits gebauten Powerfunction Treiber funktioniert prima und ist im Grunde meine erste Wahl. Allerdings möchte ich ein wenig mehr Spannung haben oder zumindest mehr bei der Versorgungsspannung. Maximal 10V sind in Ordnung, womit aber 3S Akkus mit einer Spannung von 11,1V raus sind. Leider ist für diesen Motortreiber kein Datenblatt zu finden. Motortreiber TB6612FNG Dieser ist ebenfalls so günstig wie der MX1508, kann jedoch mit einer höheren Spannung betrieben werden. Statt auf 2S Lipos, wäre hier auch 3S möglich. Vielleicht