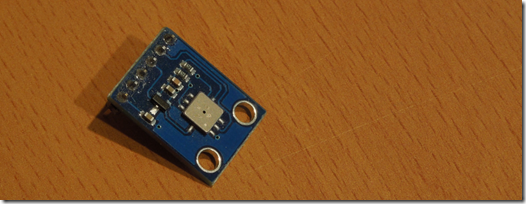
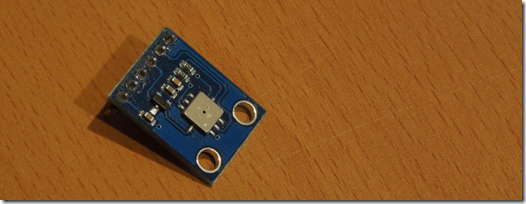
Luftdrucksensor BMP085 mit dem Netduino - Höhenangabe (Teil 4)
Mit dem Luftdruck lässt sich in etwa auch die Höhe ermitteln. Allerdings ist dieser Wert bedingt verwendbar. Zum einen muss der Sensor beim einschalten mit der aktuellen Höhe kalibriert werden und zum anderen gibt es verschiedene Formeln für die Berechnung, die spezielle Anforderungen erfüllen. Wie immer kommt es darauf an, was man möchte. Im Dokument selbst, wird nur der Luftdruck verwendet. Die Formel hierfür ist nicht sonderlich komplex und lässt sich daher in wenigen Codezeilen umsetzen. altitude = 44330 * (1 – (p/p0) 1/5.255) Nach dem Dokument auf Seite 14, ist diese Formel zu verwenden. Auffällig dürften die festen Zahlenwerten sein, die auf den ersten Blick keinen Bezug darstellen. Die Beschreibung für diese Sache ist leider ohne Begründung, was mir selbst etwas Kopfzerbrechen bildet und mich auf den Weg brachte im weiten Internet nach einer plausiblen Antwort zu suchen. Leider mit geringen Erfolg und steht daher noch auf der TODO Liste. Wer bereits für den Arduino