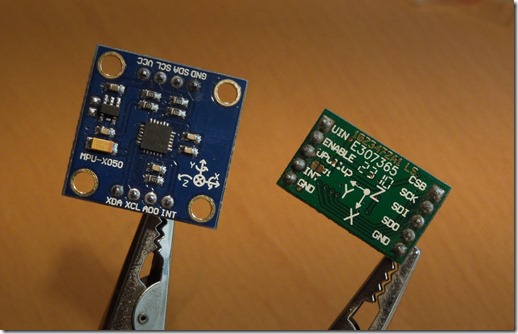
Kleiner Vergleich zwischen Netduino Plus 1 und Netduino Plus 2
Netduino Plus 1 (Links) und Netduino Plus 2 (rechts) Seit kurzem zählt zu meinem Bastelsortiment der Netduino Plus 2, der mit mehr Takt deutlich schneller rechnet als der Netduino Plus 1. Die Investition hat sich gelohnt und bringt mein Projekt weiter voran. Kommen wir zunächst zu den grundlegenden technischen Daten. Auch auf der Seite Netduino.com/Hardware/ zu finden. Netduino Plus 1 Netduino Plus 2 Speed 48 MHz 168 MHz Code Storage 64 KB 384 KB RAM 42 KB 100+ KB GPIO 20 22 UART 2 4 PWM 4 6 SPI 1 1 I²C 1 1 Klar ist, dass der neue schneller sein muss, allerdings habe ich mich gefragt, wie viel mehr ich verarbeiten kann. Nun, mein Beispiel zeigt eine kleine Rechenaufgabe, in der die Zeit gestoppt wird und man nach 100 Durchläufen den Durchschnittswert erhält. int counter = 0; long average = 0; while ( true ) { Stopwatch .GetElapsedMicrosecounds(); for ( int i = 0; i < 100; i++) { float f = ( float )Syste