Monzoom Pro Rückblick
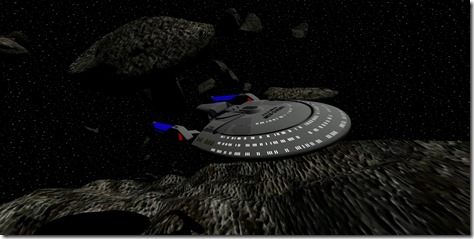
Raumschiff U.S.S.Adler Das Programm hieß vor seiner Umbenennung Reflection und war (glaube ich) ein beliebtes Werkzeug zum modulieren, texturieren und animieren in den 1990iger Jahren. Radpanzer Während meiner Schulzeit habe ich viele Modelle entworfen oder andere Objekte nachgemacht. Das Programm begleitete mich bis 2002 und zwang meinen PC in die Knie, wenn ich eine Filmsequenz gerendert habe. Angler am Strand 3D Letztes Jahr habe ich in meiner Datensicherung meine gesammelte Arbeit wiedergefunden und ich dachte, dass rendere ich mal in High Definition. Wer bereits die Videos gesehen hat, die ich auf meinem Blog gepostet habe, dürfte sich an einen Pixelhaufen erinnern. Früher hatte ich nur einen Pentium 300MHz PC, mit einer Eraser III und 64MB Arbeitsspeicher (später jedoch auf 192MB aufgerüstet). Nun denn, genug Nostalgie. Ein zusammenschnitt der 3D Animationen mit Monzoom Pro in HD Auflösung.