Zeitkritische Momente mit dem Netduino
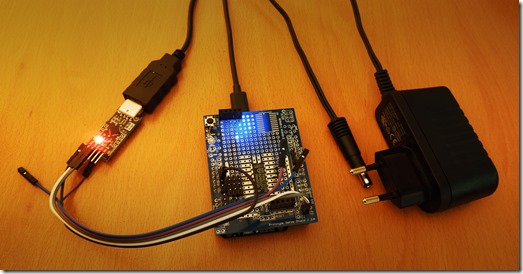
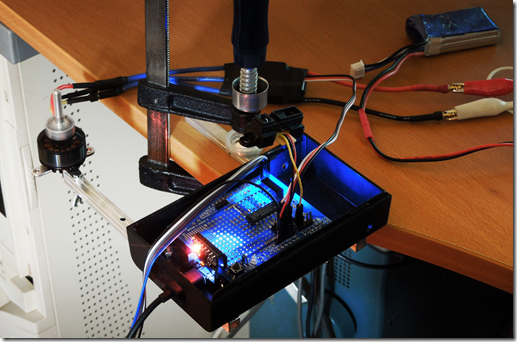
USB TTL UART, Netduino mit Shield und Schaltnetzteil für Tests. Bei einigen Anwendungen kommt es vor, dass eine Iteration möglichst wenig Zeit benötigen soll. Das bedeutet, dass man sich mit Code Optimierung beschäftigen muss, in dem man zumeist die gewohnte Art zu Programmieren überdenken muss. Grundsätzlich sollte man das nicht tun, wenn man Anfänger ist, und dann auch nicht wenn man professioneller Entwickler ist. Es sei denn, die Anforderung erfordert diese Optimierung. In der Entwicklung für meinen Quadrocopter stieß ich auf dieses Problem, dass eine Iteration viel zu lange dauert. Zwar sauber geschrieben, jedoch nicht Performance-optimiert, kam ich auf ca. 40ms bis 45ms pro Iteration. Das ergibt pro Sekunde 22 bis 25 Durchläufe. Nach den Optimierungen kam ich auf Iterationslaufzeiten von 11ms bis 22ms. Diese weite Zeitspanne entstand durch dynamische Verarbeitung von Byte Werten beim Senden und Empfangen, was jedoch ein anderes Thema abbilden würde. Zunächst benötigen wir e