Arduino Nano 3.0 und MPU6050 in Quellcode Kurzfassung
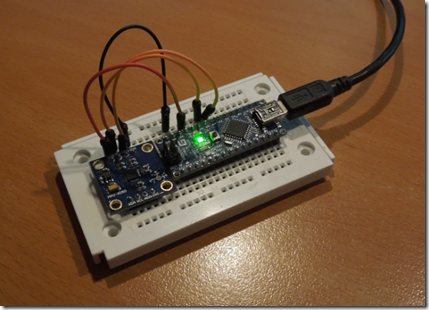
Verkabelungsbeschreibung ist am ende dieses Blogs. Bereits Anfang des Jahres habe ich eine Lösung in C# und .NET Micro Framework geschrieben. Ursprünglich habe ich die Lösung aus der in C++ geschriebenen Library portiert ( Library für Arduino ). Zuvor suchte ich nach einem kürzeren und funktionalem Beispiel, aber ohne Erfolg. Da ich nun selbst relativ gut mit dem Sensor vertraut bin, konnte ich ein kürzeres Beispiel für den Arduino schreiben. #include < Wire .h> #define sensor_address 0x68 void setup () { // 9600 Baut reichen zum Betrachten aus. Serial.begin (9600); Wire.begin (); delay (1000); // Powermanagement aufrufen // Sensor schlafen und Reset, Clock wird zunächst von Gyro-Achse Z verwendet Serial.println ( "Powermanagement aufrufen - Reset" ); SetConfiguration(0x6B, 0x80); // Kurz warten delay (500); // Powermanagement aufrufen // Sleep beenden und Clock von Gyroskopeachse X verwenden Serial.println ( "Powerm