HMC5883L Sensor auslesen mit dem Netduino
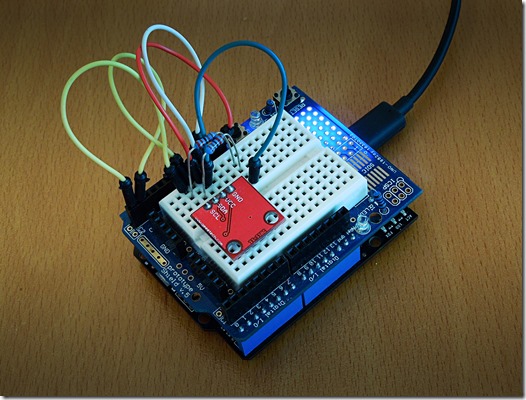
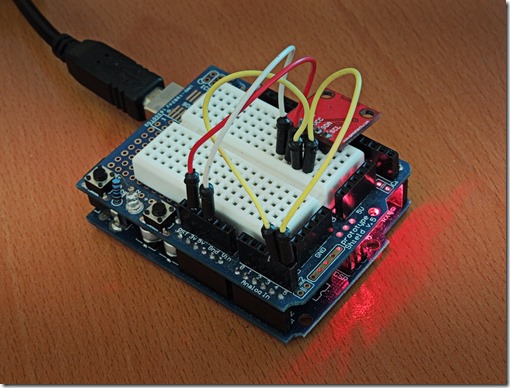
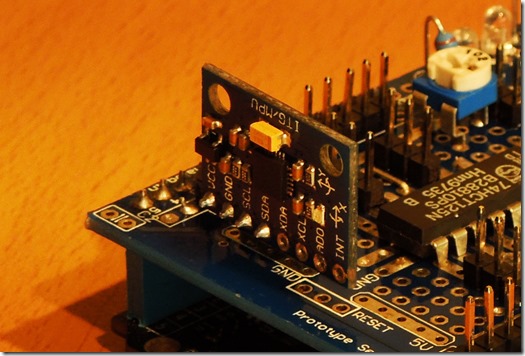
HMC5883L Magnet Sensor auf dem Breadboard Shield und PullUp-Widerständen. Was mit dem Arduino geht, geht auch mit Netduino. Auch hier konnte ich ein funktionales Beispiel für den 3 Achsen Magnet Sensor HMC5883L als Klasse schreiben. public class HMC5883L { /// Klasse für die I²C Verbindung private I2CDevice _i2CDevice; /// Die Variabeln zum Speichern der Ergebnisse nach der Messung. private byte [] _Data = new byte [6]; /// Ruft die Achse X ab oder legt diese fest. public int AxisX { get ; set ; } /// Ruft die Achse Y ab oder legt diese fest. public int AxisY { get ; set ; } /// Ruft die Achse Z ab oder legt diese fest. public int AxisZ { get ; set ; } /// Der Konstruktor Initialisiert die Verbindung her und /// stellt den Sensor mit einer Standard Konfiguration ein. public HMC5883L() { // I²C Bus verbindung herstellen mit 100kHz _i2CDevice = new I2CDevice ( new I2CDevice . Configuration (0x1E, 10