Kreisgeschwindigkeit aus dem Sensor umrechnen (Die Zweite)
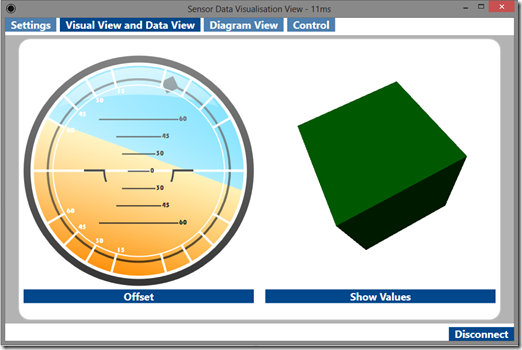
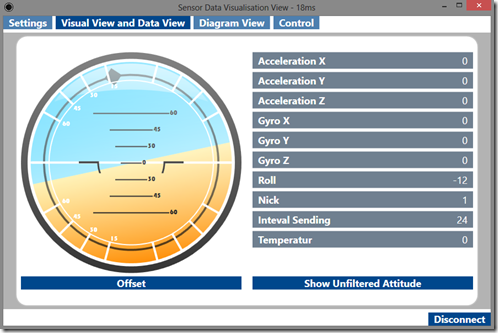
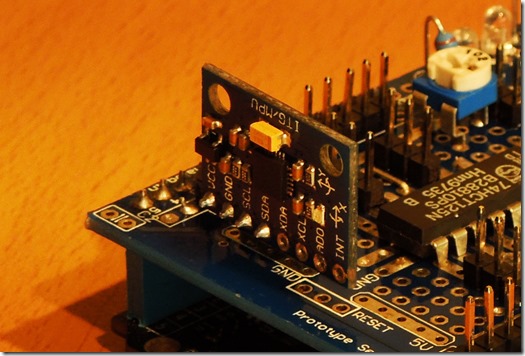
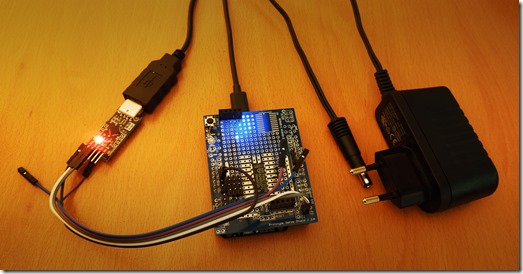
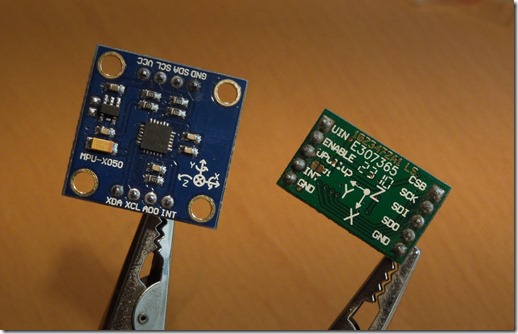
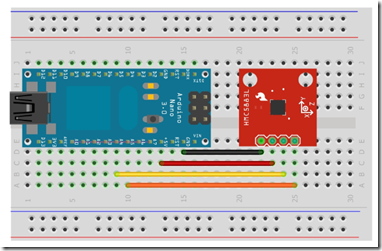
Von mir entwickeltes Programm zum darstellen eines künstlichen Horizontes und ein Würfel, das die Bewegungen des Sensors wieder gibt. Im letzten Post zeigte ich eine relativ ungenaue Lösung für das Umrechnen der Winkellage. Grund hierfür ist, dass der Zeitabstand nicht verwendet wird. Als Provisorium reicht es allerdings aus. Nun, welche Formel wird stattdessen benötigt? Kreisgeschwindigkeit = Drehwinkel / Zeitspanne steht für die Winkelgeschwindigkeit steht für den Drehwinkel steht für die vergangene Zeit Im nächsten Schritt muss ich die Formel umstellen, um später an das Ergebnis des Drehwinkels heran zu kommen. Der Sensor gibt pro Abfrage die Winkelgeschwindigkeit, und die Zeit wird zwischen der aktuellen Abfrage und der letzten Abfrage bestimmt. Die verwendeten Werte nehme ich wie zuletzt aus dem Sensor MPU6050 mit den entsprechenden Einstellungen. Der Wert 32768 ist der Maximale Einheiten Wert der in eine Richtung gemessen werden kann. Die verga