Arduino Control (Teil 2) – Button Status auf PC wiedergeben
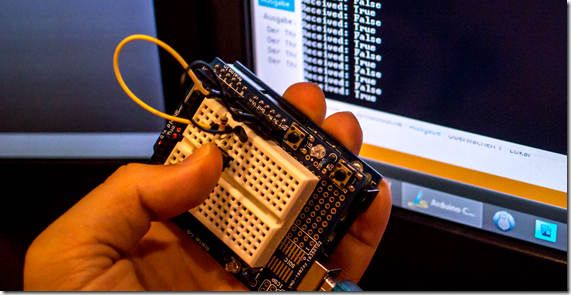
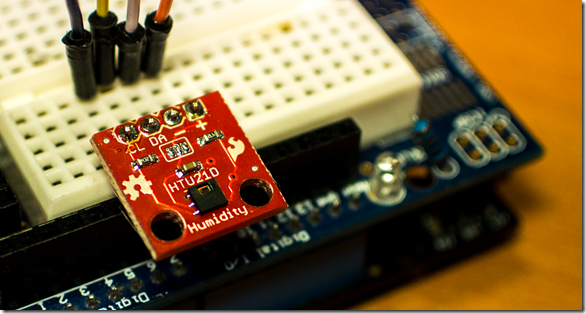
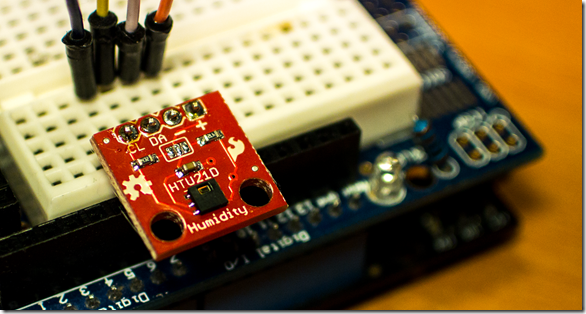
Eine Eingabe vom PC zum Arduino zu bringen ist nicht sonderlich schwierig. Das Gleiche gilt auch bei der Umsetzung einer Tasteneingabe vom Arduino zum PC. Am Arduino wird diesmal eine kleine Schaltung mit einem Button zusammengesteckt. Zusätzlich benötigt: Taster und 10k Ohm Wiederstand Kommen wir zum Consolen Programm. Wie im vorherigen Post, werden die selben Verbindungsparameter verwendet. Für den Empfang wird noch der hierfür erforderliche Event hinzugefügt. Sobald sich also Daten im Eingangspuffer befinden, wird der Inhalt der Event Methode ausgeführt. In der Schleife wird diesmal nur ein 'Thread.Sleep' eingesetzt; das soll verhindern, dass die Anwendung zu viel der CPU Zeit beansprucht (und es nicht so wirkt, als wäre sie eingefroren). static void Main( string [] args) { // Die Verwendete COM Verbindung // sollte der aus dem Arduino Programm entsprechen. SerialPort sp = new SerialPort ( "COM16" , 115200); // Event zuweisen fü