Immer wieder neue Erkenntnisse
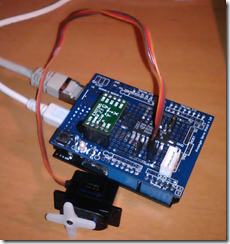
Netduino mit meinem aktuellen Shield Zugegeben, habe ich mich vielleicht etwas übernommen, als ich geglaubt habe, dass ich das in wenigen Monaten schaffe würde, eine brauchbare Lösung zu programmieren, ohne an die praktischen Schwierigkeiten zu denken. Wer kennt es nicht, dass der PC mehr Arbeitsspeicher braucht für mehrere oder besonders speicherlastige Programme. Nun, mein Programmcode für den Controller zur Steuerung über Netzwerk und das Auswerten der Sensoren erfordert mehr Speicher als das, was im Netduino Plus steckt. Mit den 42KB Arbeitsspeicher scheine ich wohl derzeitig nicht auszukommen und so muss ich wohl einen anderen Weg finden, etwas kompakter zu programmieren. Die Nummer 16 hinter Hauptroutine, bedeutet, dass der Thread angehalten ist. Der Thread wird gebraucht, um die Regler anzusteuern. Wie wirkt es sich derzeitig aus? Sobald das Ende des Arbeitsspeichers erreicht ist, kommt es zu einem Ausnahmefehler in der Methode. Da ich jeden Thread mit einer eige